Improve lane pairing documentation#542
Improve lane pairing documentation#542FabianPfeufferCAP wants to merge 1 commit intoOpenSimulationInterface:masterfrom
Conversation
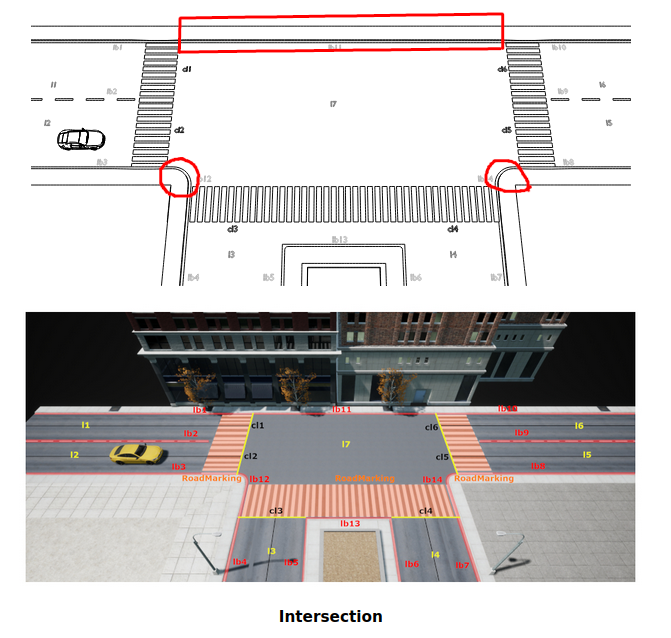
* Added an extended version of the image OSI_LaneBoundaries_And_CenterLine.svg
that includes, connected by a junction.
- The new image is called
OSI_LaneBoundaries_And_CenterLine_Intersection.svg and will replace
the old one in the Lane/Classification/Centerline section.
- The old image will still be used in the LaneBoundary/BoundaryPoint
section.
* Added a more precise description to Lane/Classification/lane_pairing
on how antecessor and successor have to be set.
Signed-off-by: Fabian Pfeuffer <fabian.pfeuffer@capgemini.com>
Signed-off-by: Fabian Pfeuffer <Fabian.Pfeuffer@partner.bmw.de>
dee315c to
c32ec44
Compare
|
This topic has been discussed at the harmonisation working group meeting. Some points are not clear, e.g. does it make sense to have such a strict rule regarding the overlapping of start/end-points of centerlines and laneboundaries? How to handle road-road-connections? etc. |
|
Thanks for the update, I looked at the ppt and it seems fine for roads, but I see an issue with non-driving roads here. Let's say a Pedestrian is walking from one sidewalk onto another one (both connected to each other). How should the definition order for non-driving roads be determined in this case? |
|
@HendrikAmelunxen
There are tree sidewalks (marked in red) that lead across this intersection. Are these sidewalks part of the intersection itself, i.e. do they have the TYPE_INTERSECTION type and SUBTYPE_SIDEWALK subtype? If this is indeed the case, I have another question with regards to the successor/antecessor pairing, proposed in the ppt. The ppt states that the successor/antecessor pairing of the intersection should be done using the "centerline_is_driving_direction" attribute of the connected roads. This is fine for driving lanes, but how should the successor/antecessor pairing be done for sidewalks? |
|
@FabianPfeufferCAP Regarding the sidewalks at intersections: Since sidewalks have a left and right boundary I would not assign them to an intersection. In general, the current roadmodel does not fit very well to the usecase of navigating along non-driving lanes. Therefore this is also a usecase which is addressed in the road model 2.0 project. Feel free to contribute there as well. |
|
@HendrikAmelunxen and @clemenshabedank , we should not forget that topic here. Does a discussion in the Road Model Group make sense? |
|
@ThomasNaderBMW yes we can discuss it in the Road Model Group. Should I invite Fabian for that? |
|
Might be handled through #599 |
|
Let's try to make a decision what to do with this quite old PR considering the upcoming v3.5 release! Here is my opinion:
For those reasons I would not like to merge it as-is and rather close it. In case logical connections for non-driving lanes are needed and not already covered by the logical lane approach I suggest to open a new PR. Is my argumentation correct and would this be fine for you @FabianPfeufferCAP ? |
|
From my point of view, we can close this issue as the logical lanes should solve this problem for my use case. For a human looking at it, it's pretty straightforward to determine if points go away from an intersection, but turning this statement into code can be quite tricky.
|
Reference to a related issue in the repository
Antecessor and successor definition for lanes #530
Add a description
Added an extended version of the image OSI_LaneBoundaries_And_CenterLine.svg
that includes, connected by a junction.
OSI_LaneBoundaries_And_CenterLine_Intersection.svg and will replace
the old one in the Lane/Classification/Centerline section.
section.
Added a more precise description to Lane/Classification/lane_pairing
on how antecessor and successor have to be set.
Some questions to ask:
What is this change?
What does it fix?
Take this checklist as orientation for yourself, if this PR is ready for the Change Control Board: